

15, 16, 20, 21 червня 2022 року в Калуському політехнічному фаховому коледжі відбулася державна атестація
студентів спеціальності 151 Автоматизація та комп’ютерно-інтегровані технології.
Частина студентів успішно здали комплексний державний екзамен за фахом, а 20 студентів виконали
реальні дипломні проєкти, які полягали у створенні діючих моделей та розробці програмних платформ на базі ARDUINO UNO, зокрема:
Безрукий Любомир Андрійович
Дипломний проєкт на тему: «Розробка та налагодження системи руху багатофункціонального автомобіля Arduino Car 4WD на мікроконтролері Arduino Uno»
Керівник дипломного проєкту Бохан Олександра Ярославівна

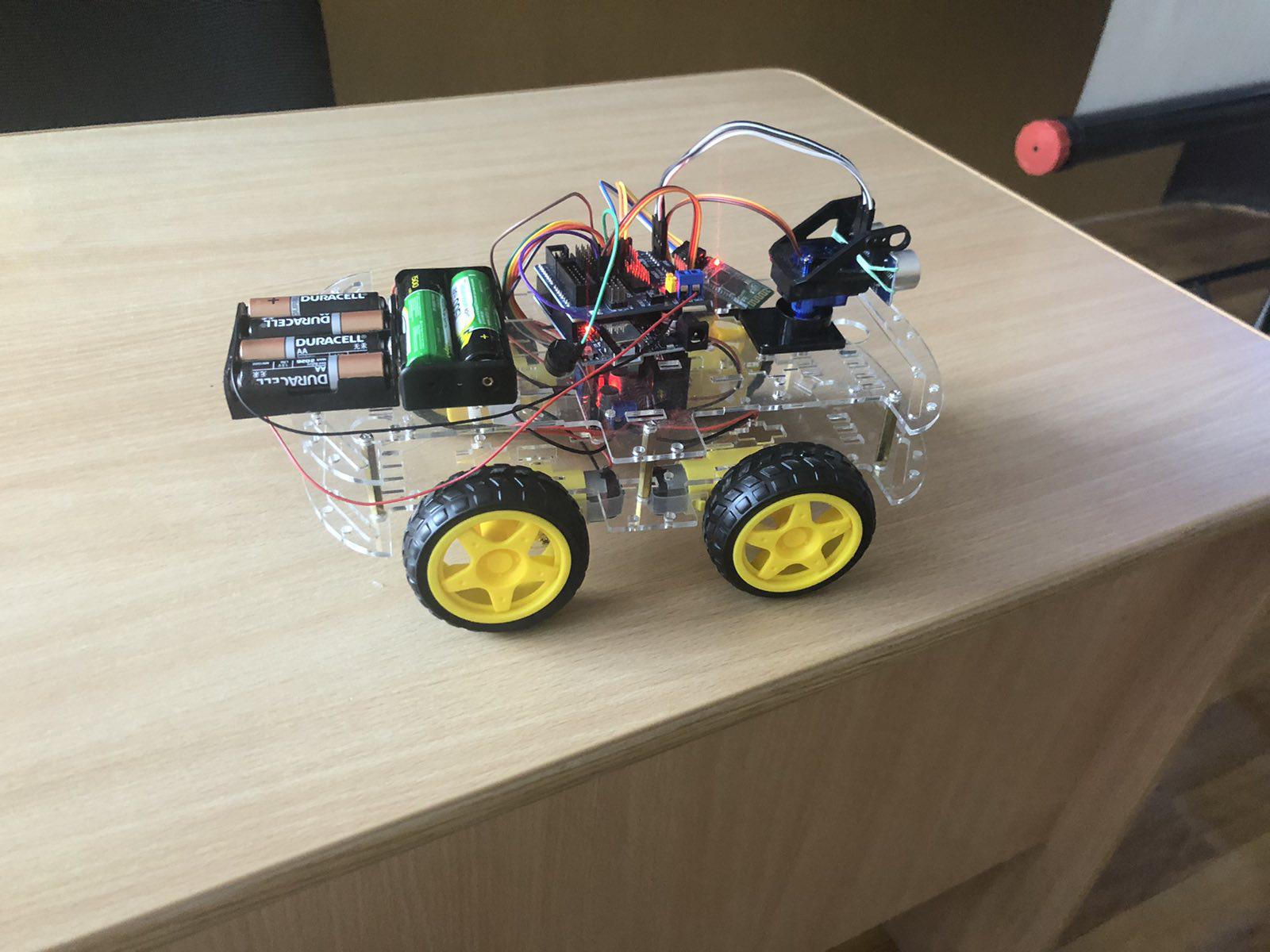
Актуальність проєкту полягає в тому, що пристрій зможе рухатися за допомогою далекоміра і Bluetooth модуля. Даний прилад призначений для пересування в недоступних для людини місцях. Також це свого роду приклад побудови автомобільного безпілотника.
Основним матеріалом для дослідження було взято Arduino UNO на основі якого і було побудовано макет приладу.
На основі даної моделі можуть бути спроектовані на розроблені десятки пристроїв які стануть розвагою для дітей, а також можуть полегшити роботу людей, які працюють з важкими матеріалами.
Устінов Віталій Володимирович
Розробка та виготовлення автоматизованої системи для віконних жалюзі на базі сучасного мікроконтролера, та його застосування
Керівник дипломного проєкту Бохан Олександра Ярославівна

Для автоматизації жалюзі було використано двигун який був приєднаний до механізму повороту жалюзів, двигун в свою чергу підключений не на пряму до плати, а через драйвер двигуна – невеличка плата яка дає можливість використовувати двигун без втрати потужності.
Для керування двигуном було створено програму яка зчитує дані з давача, фоторезистора, підключеного до аналогового входу А0.
Ленцик Віталій Васильович
Розробка та виготовлення компактного макету радіолокаційної станції на базі мікроконтролера Arduino Uno
Керівник дипломного проєкту Бохан Михайло Петрович
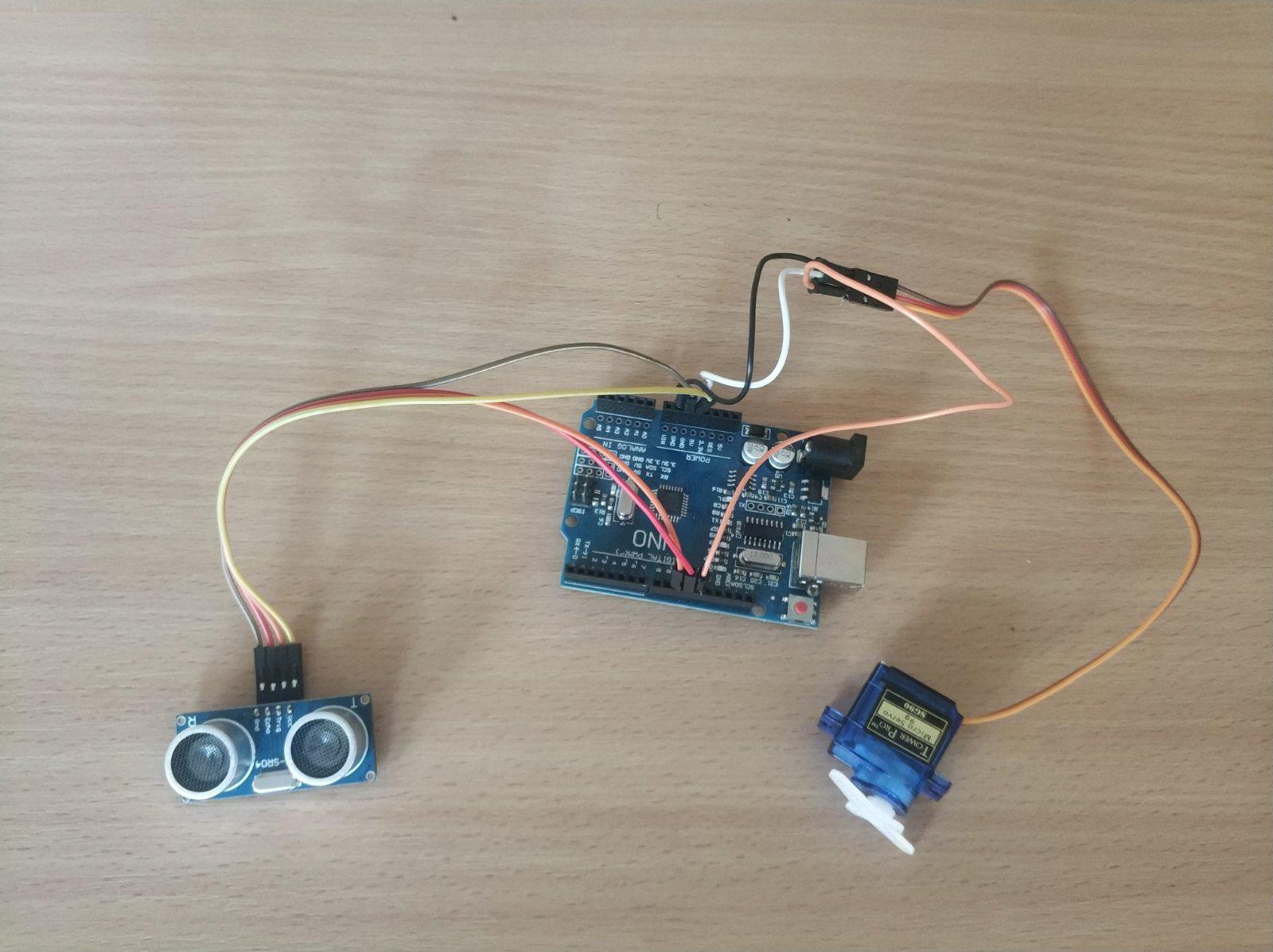
Метою роботи є вивчення особливостей сучасних радіолокаційних станцій, що використовуються в Україні, розробка системи виявлення та супроводження об’єктів з реалізацією ультразвукового макету.
Система повинна мати можливість її використання в навчальному процесі для проведення досліджень на лабораторних та практичних роботах.
Проведене дослідження радіолокаційних станцій з можливістю спостереження за виявленою ціллю дало позитивний результат. За результатами досліджень виявлено, що використання ультразвукового макету, дозволяє значно здешевити систему для того, щоб було легше впровадити розробку в навчальний процес. Простий алгоритм забезпечує швидку та безвідмовну роботу системи, а також мінімізує кількість похибок при виявленні, а застосування мікроконтролера Atmega328P та С-подібної мови програмування відкриває грандіозні можливості для наукових досліджень методів радіолокаційного виявлення та спостереження.
Мухаїр Олександр Михайлович
Розробка та виготовлення системи автоматизованого пункту пропуску на об’єктах з використанням мікроконтролера Arduino Uno
Керівник дипломного проєкту Бохан Михайло Петрович

В дипломному проєкті виконана розробка, створення робочої програми, виготовлення, зберігання інформації і робочий макет пристрою контролю доступу під управлінням мікроконтролера.
Макет дозволяє змоделювати основні функції і завдання по контролю доступу в приміщення за допомогою радіочастотної мітки. Сервопривод симулює відкритий чи закритий пункт пропуску.
Вся інформація зі зчитуваня зберігається тільки в разі підключення мікроконтролера до комп’ютера. Таким чином прилад може працювати автономно через підключений до нього блок живлення, але при цьому інформація про зчитування не зберігається.
Студенти Цимбаліста Михайло Володимирович та Каблак Дмитро Андрійович під керівництвом викладача вищої категорії, «викладача-методиста» Керницького Василя Васильовича розробили та виготовили програмований колісний робот PicoGo на базі Raspberry Pi Pico з дистанційним керуванням та розробили систему керування для робота.
Програмований колісний робот PicoGo з дистанційним керуванням — це розумний мобільний робот на базі Raspberry Pi Pico, має ультразвуковий датчик, рідко-кристальний екран,
модуль Bluetooth, датчик відстеження лінії і датчик перешкод. Управління здійснюється за допомогою інфрачервоного пульта дистанційного керування або Bluetooth.
Програмні коди системи керування написані для Raspberry Pi Pico за допомогою MicroPython.


Студенти Довбак Іван Ярославович та Даниляк Денис Іванович під керівництвом викладача вищої категорі, «викладача-методиста» Керницького Василя Васильовича
розробили та виготовили робота танка-всюдихода Military Police G2061 1/12 2.4G (камуфляж) та розробили систему дистанційного радіокерування.
Керований по радіо танк Military Police SG 1203 1/12 2.4G є високошвидкісною моделлю танка на гусеничному ходу. Торсіонна підвіска забезпечує чудові ходові якості.
Механізм кріплення переднього колеса служить для натягу гусениць, в результаті чого всюдихід здатний впевнено пересуватися по будь-якій поверхні.
Цьому роботу-танку не страшні невеликі ями, він без проблем проїжджає їх, не провалюючись.
Всюдихід рухається вперед/назад, повертає вправо і вліво, здатний обертатися на місці на 360 градусів.
2-ох швидкісна коробка передач дозволяє вибрати режим швидкості: повільна їзда і швидка їзда. Час використання: 20 хвилин. Відстань управління: 80 м. Швидкість: 12 км/год


Тема комплексного дипломного проекту: Розробка та виготовлення цифрового манометра. Розроблений прилад дозволяє вимірювати надлишковий тиск до 0.5МПа, може відображати виміряні значення тиску у різних одиницях вимірювання, дозволяє сигналізувати задане значення тиску, а також дозволяє передавати виміряне значення та попередження про перевищення значення тиску на дисплей ПК. Даний прилад може використовуватись при виконанні лабораторних робіт з дисципліни «Метрологія, технологічні вимірювання та прилади». Студенти групи 4 АКІТ 2 Матіїв Андрій, Ладаняк Микола. Керівник проекту Хемій І. Ю.



Тема комплексного дипломного проекту: Розробка та виготовлення лабораторного стенду для вимірювання відносної вологості методом точки роси. Розроблений стенд дозволяє вимірювати відносну вологість методом точки роси. Дана розробка дозволяє наочно продемонструвати особливості вибраного методу вимірювання відносної вологості і може використовуватись при виконанні лабораторних робіт з дисципліни «Метрологія, технологічні вимірювання та прилади» Студенти: Ковальчук Андрій, Маркович Віталій. Керівник: Хемій І. Ю.
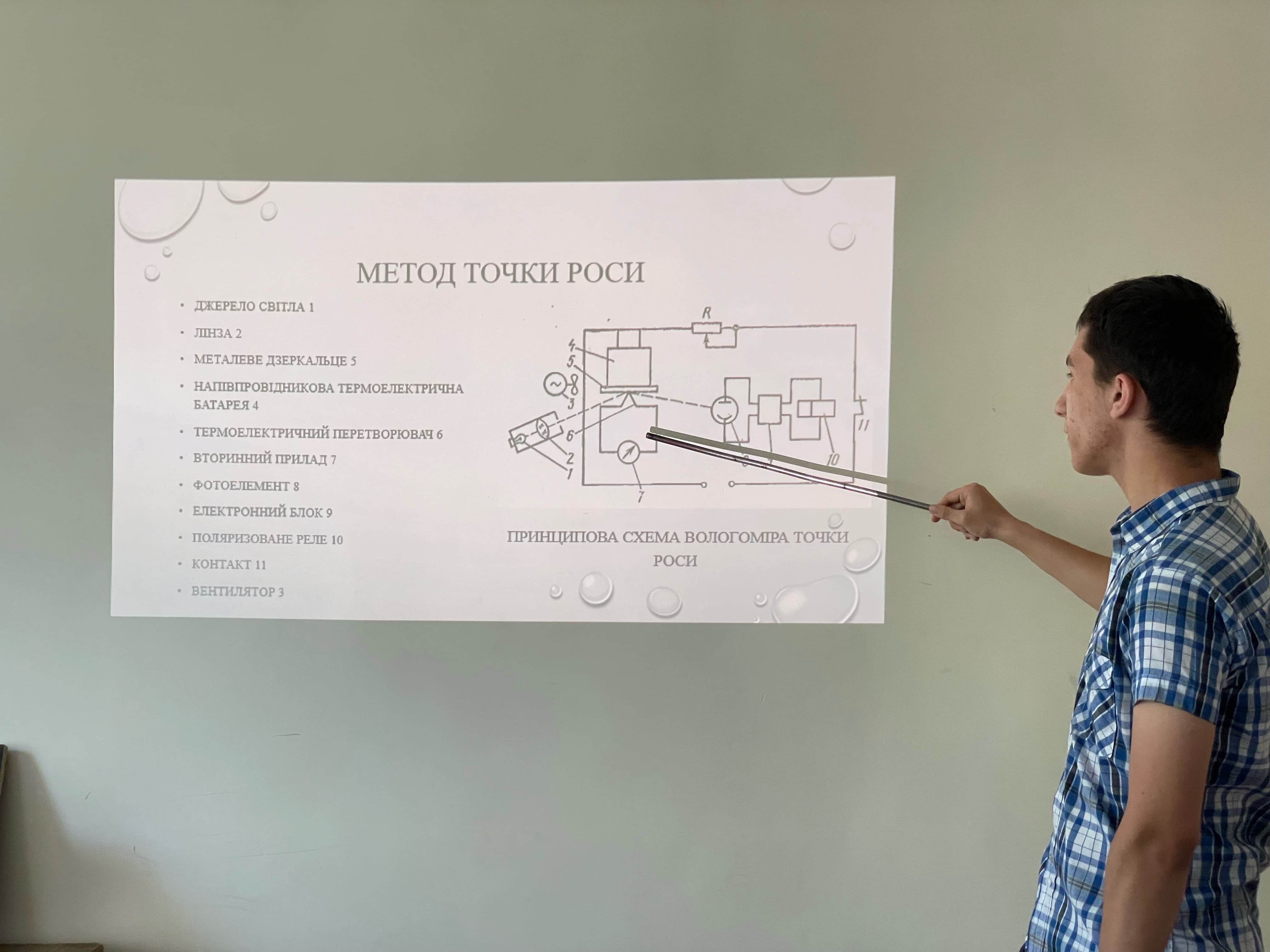


Обидва реальні дипломні проекти виконанні з використанням сучасних мікроконтролерних платформ Arduino. Програмування вибраних мікроконтролерів відбувалось за допомогою програмного продукту Arduino IDE. Розробка інтерфейсу для візуалізації виміряних параметрів на ПК відбувалась за допомогою програмного продукту Processing.
Під керівництвом спеціаліста вищої категорії Косована Р.П. студенти Гулимів Б.В., Библів Ю.Т., Бучко Д.Р., Гуссак Р.В., Захарків І.М., Коржинський А.А., Яців В.І. та Матіїв А.В. спроектували, виготовили і розробили програмні платформи для окремих підсистем розумного будинку, зокрема, клімат контролю, ідентифікації об’єкту, керування освітленням та звукового керування.
Моделі виготовлено на сучасних технічних засобах автоматизації, елементах мікроелектроніки та цифрової схемотехніки. Це дозволяє розширювати матеріально – технічну базу для спеціальності і дає можливість викладачам та студентам напрацьовувати практичні навики сучасного комп’ютерно – інтегрованого управління.


 Важливо відзначити, що проекти є комплексними і поєднують в собі використання інформаційних технологій в апаратно – програмному забезпеченні.
Важливо відзначити, що проекти є комплексними і поєднують в собі використання інформаційних технологій в апаратно – програмному забезпеченні.